
備.png)





實(shí)時(shí)監(jiān)控
系統(tǒng)采用高性能毫米波雷達(dá)和攝像頭,可全天候、全方位監(jiān)控車(chē)輛前方道路環(huán)境。

礦山車(chē)輛防撞剎車(chē)預(yù)警系統(tǒng)是保障礦山車(chē)輛安全作業(yè)的重要設(shè)備。它是一種基于先進(jìn)傳感器技術(shù)、人工智能算法和車(chē)載顯示終端的智能安全輔助系統(tǒng)。該系統(tǒng)可以實(shí)時(shí)監(jiān)控車(chē)輛前方的道路環(huán)境, 準(zhǔn)確識(shí)別潛在的碰撞風(fēng)險(xiǎn),通過(guò)自能感知、實(shí)時(shí)給駕駛員語(yǔ)音提示、自動(dòng)制動(dòng),減少因駕駛員疏忽、盲區(qū)或復(fù)雜環(huán)境導(dǎo)致的碰撞事故。
露天礦機(jī)動(dòng)車(chē)輛最大的隱患是車(chē)輛相撞,事故一旦發(fā)生后果嚴(yán)重。毫米波雷達(dá)、機(jī)器視覺(jué)和高精度北斗定位的應(yīng)用,推動(dòng)車(chē)輛主動(dòng)防撞技術(shù)的發(fā)展。 我公司率先運(yùn)用這三類(lèi)最新技術(shù)并精準(zhǔn)融合,為露天礦車(chē)輛主動(dòng)防撞剎車(chē)系統(tǒng)找到了最佳路線
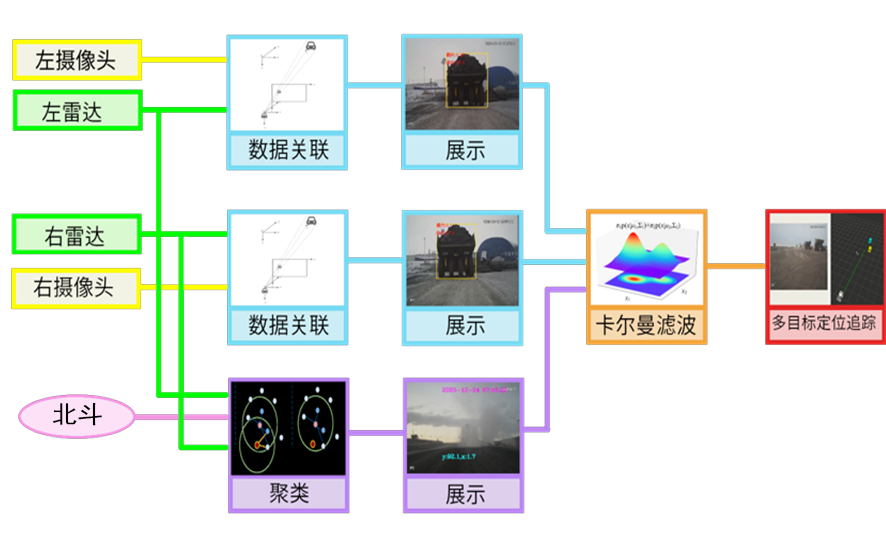
毫米波雷達(dá)、 機(jī)器視覺(jué)和北斗RTK高精度定位構(gòu)成了障礙物檢測(cè)的傳感器集合。毫米波雷達(dá)具有遠(yuǎn)距離精準(zhǔn)測(cè)距的能力,機(jī)器視覺(jué)具有遠(yuǎn)距離目標(biāo)識(shí)別和分類(lèi)的能力, 北斗RTK高精度定位具有在能見(jiàn)度低的環(huán)境中正常定位的能力。我們?nèi)诤先N傳感器的長(zhǎng)處,期望實(shí)現(xiàn)在夜間、大霧、雨雪和粉塵環(huán)境中強(qiáng)健其穩(wěn)定應(yīng)用
系統(tǒng)采用高性能毫米波雷達(dá)和攝像頭,可全天候、全方位監(jiān)控車(chē)輛前方道路環(huán)境。
基于深度學(xué)習(xí)算法,系統(tǒng)能夠準(zhǔn)確識(shí)別車(chē)輛前方的障礙物,計(jì)算其距離、速度和運(yùn)動(dòng)軌跡,有效過(guò)濾誤報(bào)。
當(dāng)系統(tǒng)判斷有碰撞風(fēng)險(xiǎn)時(shí),會(huì)通過(guò)聲光報(bào)警、儀表板顯示等方式向駕駛員發(fā)送預(yù)警信息,提醒駕駛員及時(shí)制動(dòng)或避讓。